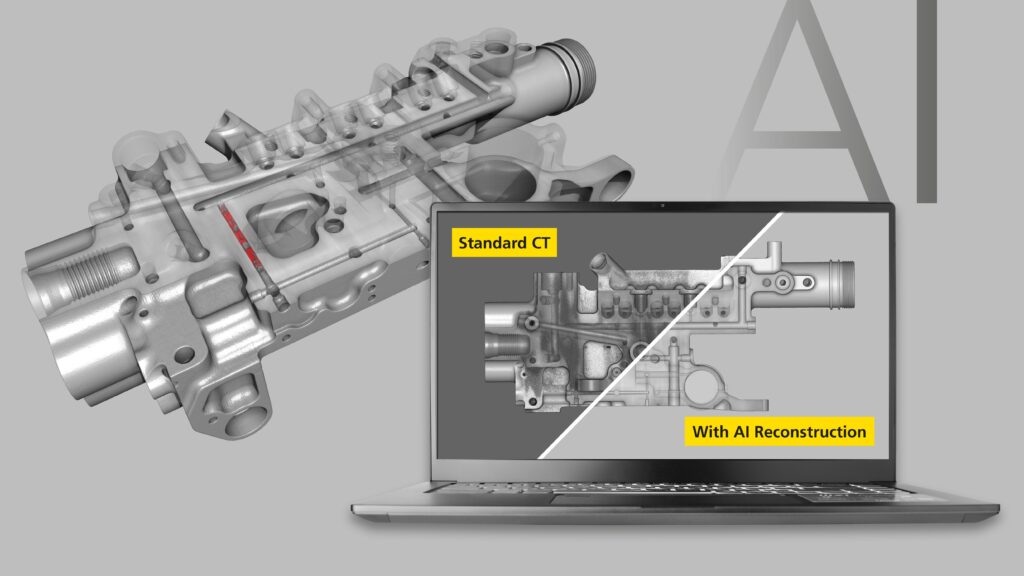
Nikon’s AI Reconstruction draws on Deep Learning to deliver faster, clearer CT scans
News
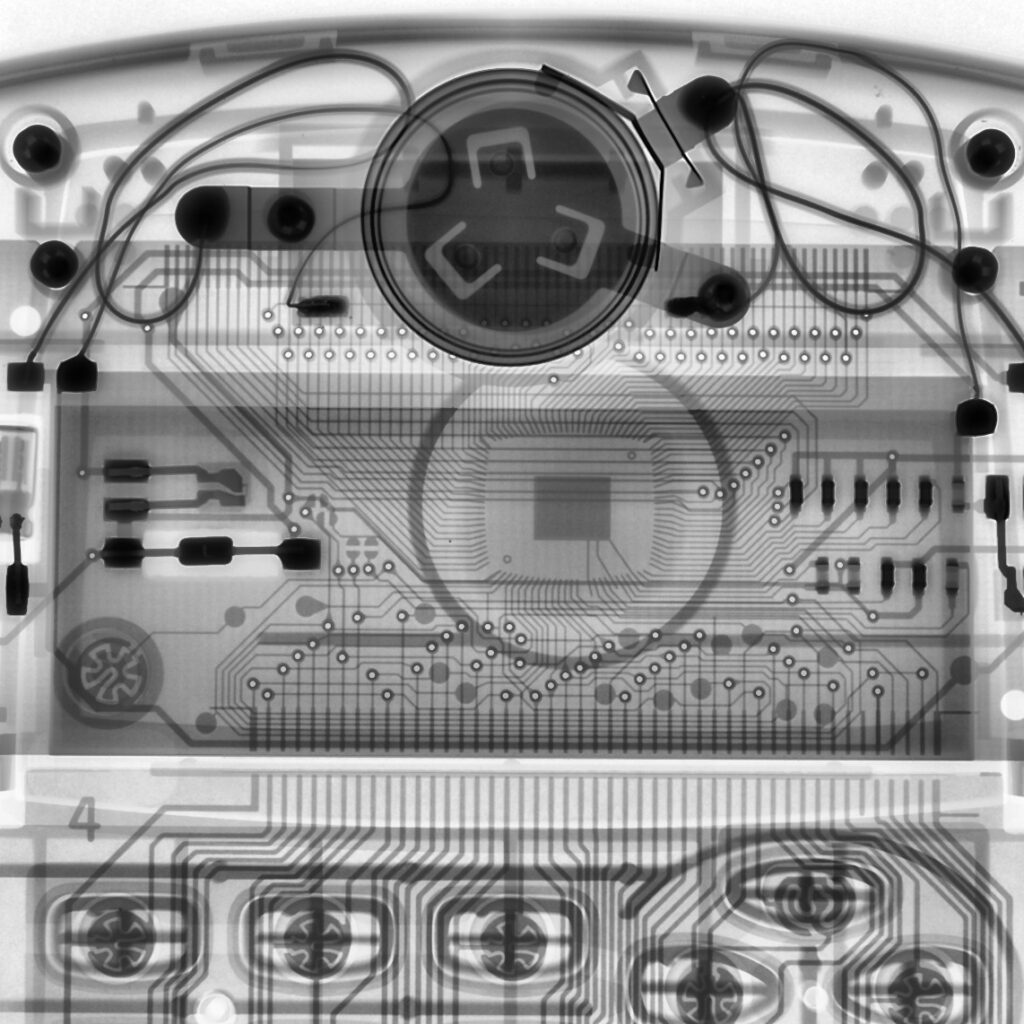
Nikon IMBU (https://industry.nikon.com) has released AI Reconstruction, an innovative 3D computed tomography (CT) reconstruction software solution powered by artificial intelligence…
Read Article